





伺服電機用于閉環(huán)系統(tǒng)并基于誤差反饋運行將目標值與電機/負載實際達到的值進行比較。由于機械系統(tǒng)具有慣性和柔順性,因此很少能在第一個位置命令上達到目標值因此需要反饋和修正命令。伺服調(diào)整是一種調(diào)整反饋以確定系統(tǒng)試圖糾正錯誤的努力程度的方法。
伺服調(diào)諧過程意味著調(diào)整伺服控制器中的各種增益和運動參數(shù),以優(yōu)化性能即運動平穩(wěn),在運動期間和運動之后幾乎沒有或沒有可聞噪聲,并且在運動之后幾乎沒有或沒有位置誤差。命令動作完成。換句話說,調(diào)整的目標是實現(xiàn)系統(tǒng)的最快響應(yīng),同時避免或最小化目標值(通常是位置或速度)的超調(diào)。
一、自動調(diào)節(jié)
大多數(shù)伺服控制供應(yīng)商在其運動控制軟件中提供自動調(diào)整選項。自動調(diào)諧使用伺服驅(qū)動器和控制器在多個頻率下測試系統(tǒng)并設(shè)置調(diào)諧參數(shù)(通常比用于手動調(diào)諧的參數(shù)更多)以實現(xiàn)最佳響應(yīng)。然而,自動調(diào)整并不總是能夠產(chǎn)生最優(yōu)化的運動,尤其是在高度動態(tài)的系統(tǒng)中。這就是手動調(diào)整的用武之地。
二、手動調(diào)整
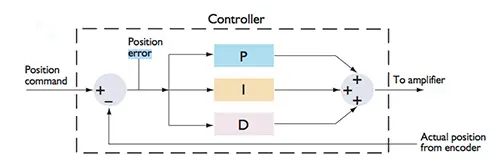
手動調(diào)整伺服電機有多種方法,但目前使用最廣泛的方法是PID算法。PID算法負責生成發(fā)送到伺服驅(qū)動器(也稱為伺服放大器)的命令級別。它是伺服控制器輸出與電機和負載性能之間的有效校正因子。當根據(jù)系統(tǒng)反饋檢測到差異時,PID算法會生成一個命令來糾正錯誤。
顧名思義,PID算法由三個部分組成:
(1)P=比例增益(K p)
比例增益與系統(tǒng)剛度有關(guān)。Kp的水平?jīng)Q定了用于克服位置誤差的命令電壓(恢復力)。術(shù)語比例增益源于恢復力與位置誤差成正比的事實。
(2)I=積分增益(Ki)
積分增益在移動結(jié)束期間提供恢復力,以將軸推到零定位誤差點。它被稱為積分增益,因為它對位置誤差進行積分(累積)。誤差存在的時間越長,積分就越大。結(jié)合積分增益,指定了積分限制。積分限制決定了用于校正靜態(tài)位置誤差的命令輸出的最大值,從而防止振蕩和不穩(wěn)定。
(3)D=微分增益(K d)
微分增益是系統(tǒng)的阻尼。它可以被認為是一個減震器,減少超調(diào)和振蕩。微分增益決定了與位置誤差的變化率(微分)成正比的恢復力的大小。微分增益的一個重要伴隨是微分采樣周期(T d)。采樣周期指定計算位置誤差導數(shù)的頻率。更高的導數(shù)采樣周期可以改善阻尼并增加穩(wěn)定性。
可以通過多種程序?qū)崿F(xiàn)伺服調(diào)整,但最常見的方法是從增加Kp開始,直到系統(tǒng)超過目標(系統(tǒng)欠阻尼)。然后增加K d直到系統(tǒng)變得臨界阻尼(快速響應(yīng)和低過沖之間的平衡)。接下來,將Kp和Kd增加到維持臨界阻尼響應(yīng)的最大量。
一旦確定了K p和K d,就設(shè)置了K i。積分增益有助于消除系統(tǒng)中的最后一點誤差,但與Kp和Kd不同,積分增益應(yīng)保持盡可能低,以防止系統(tǒng)變得不穩(wěn)定。
三個主要特征可幫助確定系統(tǒng)何時得到適當調(diào)整。第一個是過沖,或者超過目標位置的程度。接下來是響應(yīng)時間,即系統(tǒng)達到目標值的指定百分比所花費的時間。同樣重要的是穩(wěn)定時間,或目標值穩(wěn)定在一定百分比內(nèi)的時間。
伺服調(diào)整不是一門精確的科學對于任何給定的應(yīng)用,都沒有一套正確的調(diào)整參數(shù)。最好的工具是經(jīng)驗、在調(diào)整參數(shù)時對系統(tǒng)的密切觀察,以及對試錯法的耐心。
