





步進電機因其精確的定位能力和易于控制的特性,廣泛應(yīng)用于各類自動化設(shè)備和機器人系統(tǒng)中。要實現(xiàn)對步進電機的有效控制,必須依賴于其驅(qū)動電路。步進電機驅(qū)動電路的組成包括電源模塊、控制器、驅(qū)動模塊、反饋系統(tǒng)(可選)以及附加保護電路。本文將簡要介紹步進電機驅(qū)動電路的主要組成部分。
1.電源模塊
電源模塊是驅(qū)動電路的基礎(chǔ),提供所需的電壓和電流。步進電機通常需要的電源電壓范圍較廣,常見的有5V、12V、24V等。選擇合適的電源能夠確保電機在不同負載下正常工作。
2.控制器
控制器負責生成驅(qū)動信號,控制步進電機的運動方式。常見的控制器包括微控制器(如Arduino、STM32等)和專用步進電機驅(qū)動芯片(如A4988、DRV8825等)。控制器可以按照預設(shè)的程序發(fā)出脈沖信號,以控制電機的步進角度和轉(zhuǎn)速。
3.驅(qū)動模塊
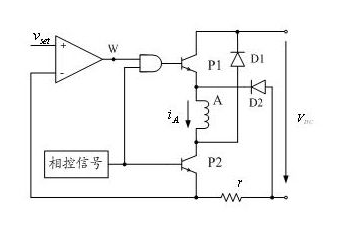
驅(qū)動模塊是連接電源和電機的橋梁,負責將控制器發(fā)出的信號轉(zhuǎn)換為電機所需的電流和電壓。驅(qū)動模塊通常包含功率放大器和驅(qū)動電路,以確保電機在工作時能夠獲得足夠的驅(qū)動能力。對于大功率電機,可能還需要使用功率MOSFET或IGBT來提高驅(qū)動效率。
4.反饋系統(tǒng)(可選)
在一些高精度的應(yīng)用中,反饋系統(tǒng)至關(guān)重要。通過使用編碼器或位置傳感器,反饋系統(tǒng)能夠?qū)崟r監(jiān)測電機的位置和速度,確保其精確控制。這種閉環(huán)控制系統(tǒng)可以提高步進電機的性能,減少因負載變化導致的步進失步現(xiàn)象。
5.附加保護電路
為了保護電機和驅(qū)動電路,通常還需設(shè)計一些附加保護電路,如過流保護、過熱保護和短路保護等。這些保護措施能夠有效延長電機和驅(qū)動電路的使用壽命,并提高系統(tǒng)的可靠性。
