





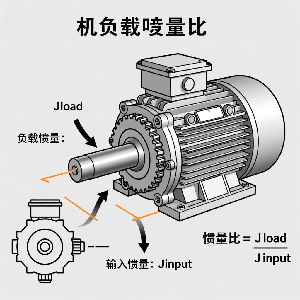
伺服行星減速機(jī)在高精度控制中,負(fù)載慣量比(負(fù)載慣量/電機(jī)慣量,通常記為Jr/Jm)對(duì)響應(yīng)速度、過(guò)渡響應(yīng)和穩(wěn)態(tài)誤差有決定性影響。比值過(guò)大時(shí),電機(jī)難以快速帶動(dòng)負(fù)載、出現(xiàn)超調(diào)與定位滯后。
伺服行星減速機(jī)負(fù)載慣量比一般超5-10倍,會(huì)顯著影響伺服系統(tǒng)響應(yīng),具體因應(yīng)用場(chǎng)景、電機(jī)及驅(qū)動(dòng)器特性而異:
1.理論依據(jù):負(fù)載慣量比過(guò)大,電機(jī)克服負(fù)載慣量阻力困難,影響加減速;還會(huì)破壞系統(tǒng)穩(wěn)定性與響應(yīng)性平衡,驅(qū)動(dòng)器為穩(wěn)系統(tǒng)會(huì)降響應(yīng)速度。
2.場(chǎng)景差異:一般工業(yè)自動(dòng)化場(chǎng)景,負(fù)載慣量比超8倍,電機(jī)響應(yīng)明顯變慢;高精度運(yùn)動(dòng)控制場(chǎng)景,超5倍位置誤差和響應(yīng)延遲會(huì)被放大。
3.設(shè)備特性:高功率、高轉(zhuǎn)矩電機(jī)承受負(fù)載慣量比能力強(qiáng);先進(jìn)驅(qū)動(dòng)器雖能補(bǔ)償負(fù)載慣量變化,但負(fù)載慣量比超10倍,響應(yīng)仍顯著下降。
